概要
- Timer Camera F/X、Unit Camなどで画像を撮影したものを、リアルタイム(一応動画っぽく)でM5Stackの画面に表示する。
- 送信側、受信側どちらもArduino IDEで作成。
- 撮影したjpegファイルデータのバイト列をシリアル通信(Grove接続)でそのまま渡す。
- 同期取るために区切り文字の設定必要。
- 送信側はjpegを撮影するごとに送信、受信側はjpegを受信するごとに表示。
- 表示速度は遅い。シリアル通信なので、115200bps = 115.2kbps、画面表示の遅さも影響して4fps=4フレーム/1秒くらい。
 Timer CameraとM5Stack
Timer CameraとM5Stack
コード
送信側:Timer Camera / Unit Cam
#include "esp_camera.h"
void setup() {
Serial.begin(115200);
Serial1.begin(115200, SERIAL_8N1, 13, 4);
camera_config_t config;
config.ledc_channel = LEDC_CHANNEL_0;
config.ledc_timer = LEDC_TIMER_0;
config.pin_d0 = 32;
config.pin_d1 = 35;
config.pin_d2 = 34;
config.pin_d3 = 5;
config.pin_d4 = 39;
config.pin_d5 = 18;
config.pin_d6 = 36;
config.pin_d7 = 19;
config.pin_xclk = 27;
config.pin_pclk = 21;
config.pin_vsync = 22;
config.pin_href = 26;
config.pin_sccb_sda = 25;
config.pin_sccb_scl = 23;
config.pin_pwdn = -1;
config.pin_reset = 15;
config.xclk_freq_hz = 20000000;
config.pixel_format = PIXFORMAT_JPEG;
config.frame_size = FRAMESIZE_QVGA;
config.jpeg_quality = 30;
config.fb_count = 2;
config.grab_mode = CAMERA_GRAB_LATEST;
config.fb_location = CAMERA_FB_IN_PSRAM;
esp_err_t err = esp_camera_init(&config);
if (err != ESP_OK) {
Serial.printf("Camera init failed with error 0x%x", err);
return;
}
sensor_t *s = esp_camera_sensor_get();
s->set_vflip(s, 1);
}
void loop() {
camera_fb_t *fb = esp_camera_fb_get();
if (fb) {
Serial1.print("DATA");
Serial1.write((byte *)&(fb->len), 4);
Serial1.write(fb->buf, fb->len);
esp_camera_fb_return(fb);
}
}

受信側:M5Stack
#include <M5Stack.h>
uint8_t buf[10000];
size_t data_size;
void setup() {
M5.begin();
Serial.begin(115200);
Serial1.begin(115200, SERIAL_8N1, 21, 22);
}
void loop() {
if (Serial1.available() > 4){
if (Serial1.read() == 'D') {
if (Serial1.read() == 'A') {
if (Serial1.read() == 'T') {
if (Serial1.read() == 'A') {
Serial1.readBytes(buf, 4);
data_size = buf[0] | buf[1] << 8 | buf[2] << 16 | buf[3] << 24 ;
Serial1.readBytes(buf, data_size);
M5.Lcd.drawJpg(buf, data_size, 0, 0, 320, 240);
}
}
}
}
}
結果
- 結構簡単なコードでできました。やっぱ遅いけど。
- 早くするならWifi / Bluetoothなど使ったほうがいい。
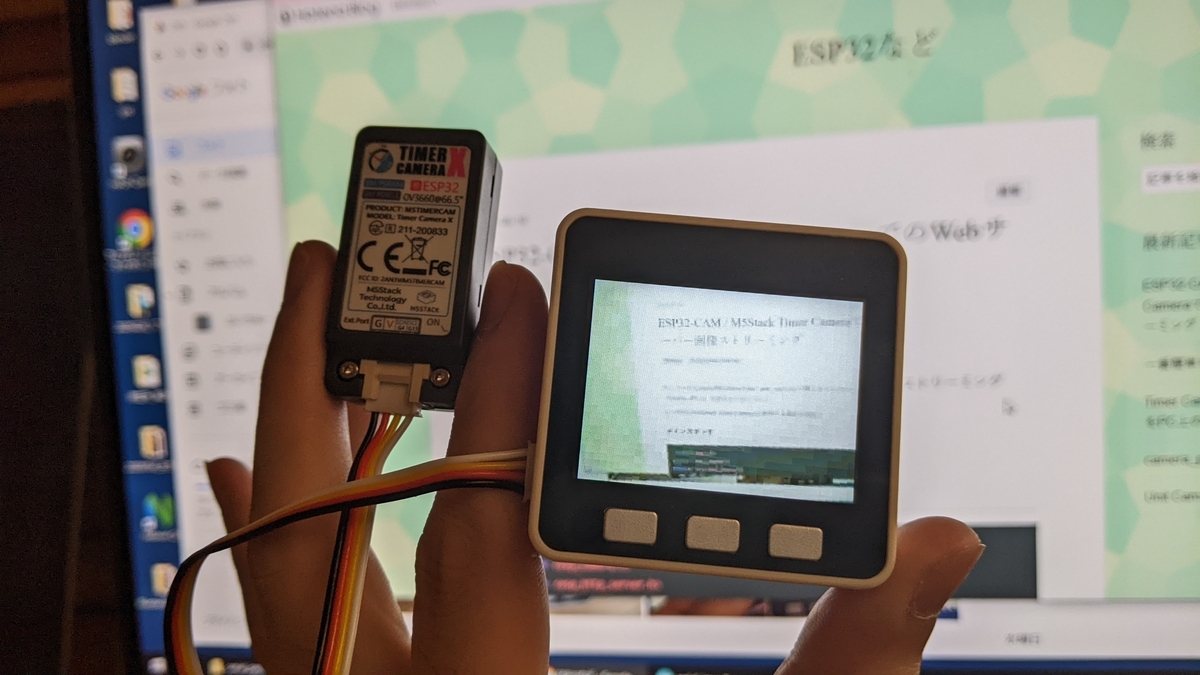 Timer CameraとM5Stackでの撮影
Timer CameraとM5Stackでの撮影